Simulation¶
A complete simulation is composed of many systems or blocks.
In this manual the sensors, the environment and the Veronte Autopilot 1x subsystem have been already introduced. All theses blocks must be combined with others, such as Airframe block to simulate the vehicle behavior.
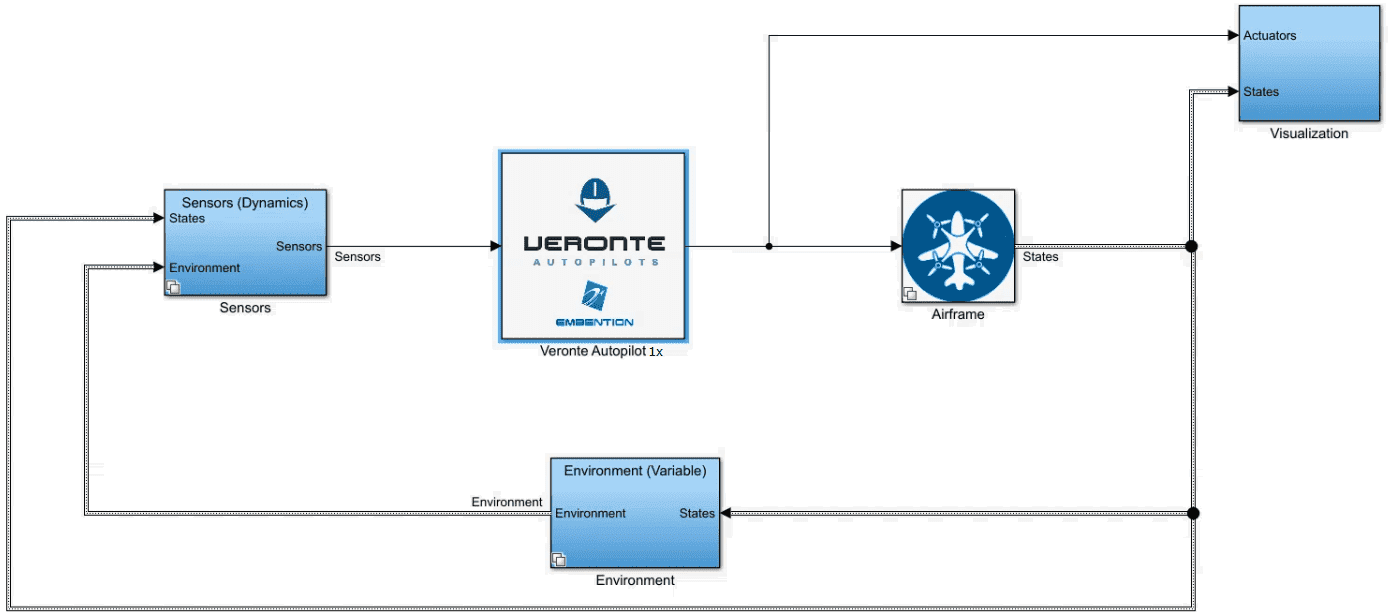
Once the main blocks are configured, the complete simulation result should look like this:
Complete Setup Example¶
Important
Please note that this is only an example.
Users will not receive this example with SIL Simulator package.
The main systems are:
Veronte Autopilot 1x: Consists basically of the S-Function and its link with the rest of the blocks (sensors, outputs, etc.)
Airframe: A model of the flight dynamics. The inputs of this system are the outputs of the Veronte Autopilot 1x system (nominal value for servos).
For example, for a quadcopter, the input to this block consists of the PWM signal values (one for each motor). Then, with this value, the airframe system updates the status of the platform. The state vector is used to predict new environmental conditions and sensor readings.
Environment: A model of the atmosphere, magnetic field, WGS84, etc.
Sensors: It contains individual blocks or subgroups of all sensors that Veronte Autopilot 1x needs as input.
Visualization: Contains display blocks, scopes, flight instruments, etc.
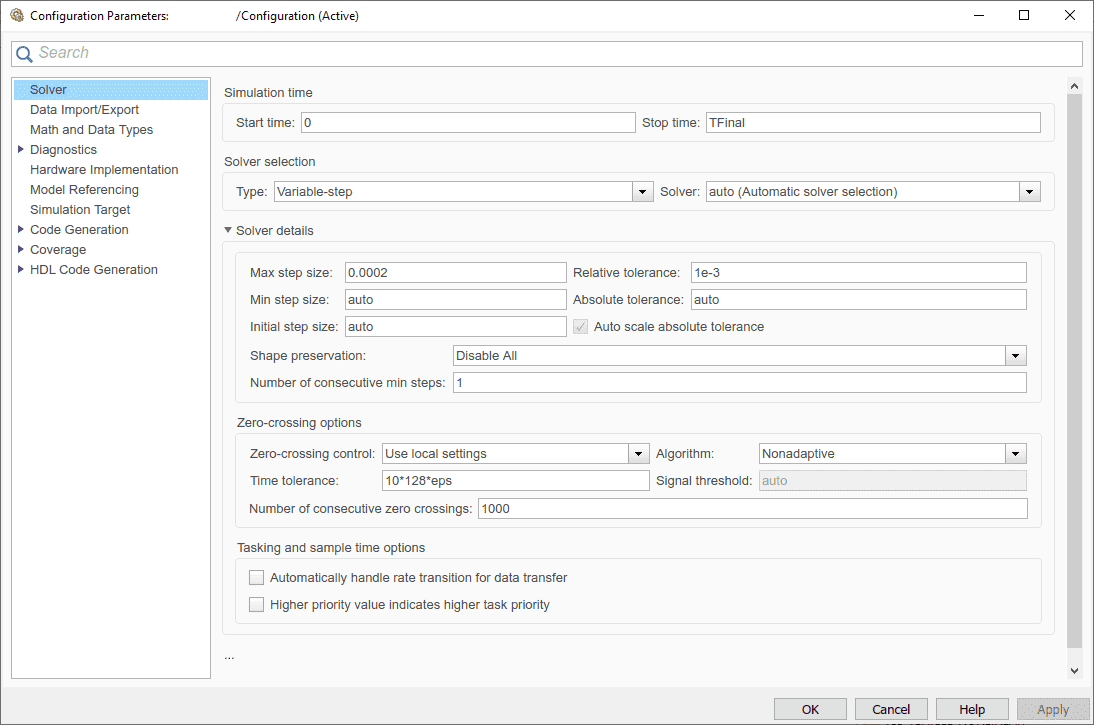
To ensure that everything works correctly, users must choose the simulation time step according to GNC frequency and core 1 frequency. Core 1 frequency is 1000 Hz fixed while GNC frequency is configurable. The simulation time step must be a common divisor of both time steps.
For example: if GNC has a time step of 0.0025 s (frequency = 400 Hz) and core 1 has a time step of 0.001 s (1000 Hz), the simulation can be set to 0.0005 s (2000 Hz), so the S-Function will execute core 1, GNC or both everytime they are required.
Time step settings¶